在自動化焊接的廣闊領域中,焊縫跟蹤技術宛如精準焊接的 "眼睛",是實現高精度焊接的關鍵所在。以往的傳統焊接方式,大多依靠人工的豐富經驗或者預先設定好的程序來進行操作。然而,在實際生產中,工件可能會出現形變,裝配也可能存在誤差等動態變化情況,傳統方式很難適應這些變化,這就導致焊接質量不穩定,成為工業焊接發展的一大瓶頸。而鐳爍光電科技有限公司憑借激光傳感技術與智能算法的巧妙結合,成功研發出高效且可靠的焊縫激光跟蹤系統,為工業焊接領域帶來了創新性的解決方案。
一、激光焊縫跟蹤技術的核心原理
激光焊縫跟蹤技術宛如一個精密的 "動態監控系統",通過 "主動光學探測 + 實時數據處理" 的方式,實現對焊縫的精準定位以及焊接路徑的實時修正。其核心流程主要包含以下三個重要部分:
(一)線激光掃描與三維成像構建焊縫 "數字模型"
系統運行時,高精度的線激光發射器會向焊縫區域投射出激光條紋,這些激光條紋就像給焊縫區域編織了一張 "光的網絡"。當激光束照射到工件表面時,由于焊縫存在坡口、間隙等幾何形變,這張 "光的網絡" 會發生畸變。此時,內置的工業相機會同步行動,迅速采集這些畸變后的激光條紋圖像。就如同測繪人員利用三角測量法繪制地圖一樣,系統結合線激光三角測量法,對采集到的圖像進行處理,從而計算出焊縫區域的三維輪廓數據,為后續的分析提供精確的基礎數據。
(二)特征提取與焊縫定位精準鎖定焊接 "靶心"
基于先進的點云數據處理算法,系統如同一位精細的 "數據分析師",從三維輪廓數據中精準提取焊縫的關鍵特征參數,這些參數包括中心位置、寬度、深度以及傾斜角度等。以常見的 V 型坡口焊縫為例,算法會像 "偵探" 一樣敏銳地識別出坡口兩側的邊緣,然后通過幾何擬合的方法,準確確定焊縫的中心線;而對于搭接焊縫,系統則會依據高度差來判斷接頭位置,確保能夠精準鎖定焊接的 "靶心"。
(三)動態跟蹤與閉環控制實現焊接 "實時校準"
系統將獲取到的焊縫位置信息實時傳輸給焊接機器人控制系統,這就好比給機器人裝上了 "實時導航系統"。控制系統會通過 PID 控制算法或者更先進的自適應算法,對焊槍的位姿進行動態調整,包括橫向偏移、高度以及角度等方面,確保焊槍始終沿著焊縫中心運動。即使在焊接過程中,工件因為熱變形或者受到機械振動而發生偏移,該系統依然能夠憑借其強大的計算和調整能力,實現 ±0.01mm 級的跟蹤精度,保障焊接工作的穩定進行。
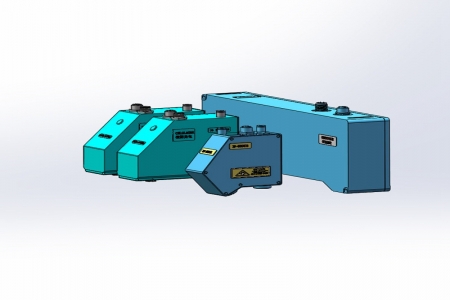
二、激光跟蹤系統的核心組件解析
鐳爍光電的焊縫跟蹤系統由三個核心模塊構成,它們相互協作,共同保障系統的高效運行。
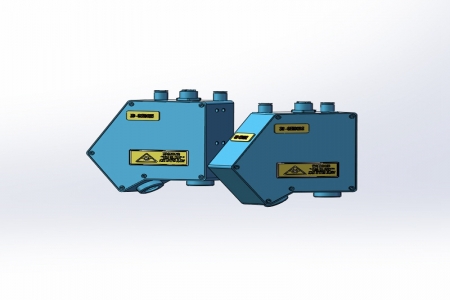
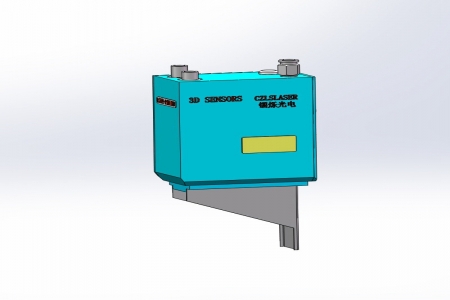
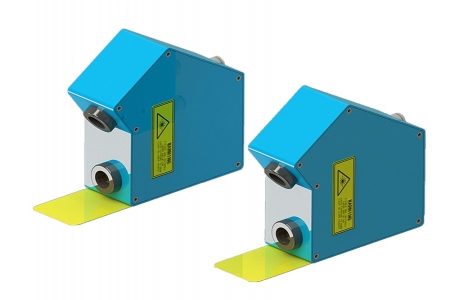
(一)光學傳感單元
該單元采用了抗干擾性極強的藍光激光,其波長為 405nm。這種藍光激光就像一雙不畏強光和煙塵的 "眼睛",能夠在強弧光、煙塵等惡劣的工業環境下穩定工作。搭配高幀率的激光相機,能夠快速、清晰地捕捉到焊縫區域的圖像信息,為后續的數據處理提供高質量的原始數據。
(二)數據處理單元
內置的專用 GPU 就如同系統的 "大腦加速器",能夠對圖像處理進行加速,支持毫秒級的響應速度。無論是角焊縫、對接焊縫等多種焊縫類型,該單元都能夠兼容處理,快速準確地從大量的圖像數據中提取出關鍵信息,為焊接機器人的控制提供及時、準確的指令。
(三)通信與控制接口
該接口支持 EtherCAT、Profinet 等多種工業協議,就像一座 "通用橋梁",能夠與主流的焊接機器人,如 KUKA、FANUC 等實現無縫對接。通過這座 "橋梁",系統能夠與機器人進行高效的通信和協作,確保整個焊接過程的順暢運行。
三、技術優勢與多元化應用場景
(一)顯著的技術優勢
高適應性:應對復雜場景的 "多面手"
該技術能夠輕松應對復雜曲面、反光表面以及多層多道焊等多種復雜場景。在面對不同形狀和材質的工件時,依然能夠準確地識別焊縫,確保焊接質量不受影響,展現出強大的適應能力。
實時性強:滿足高速焊接的 "加速器"
數據處理周期≤5ms,這一強大的實時處理能力能夠滿足高速焊接的需求。在汽車產線中,焊速可達 6-12m/min,系統能夠實時跟蹤焊縫,確保在高速焊接過程中,焊槍始終準確地沿著焊縫移動,保證焊接的精度和質量。
降低綜合成本:提升效益的 "利器"
該技術能夠有效減少人工示教時間,降低對人工經驗的依賴,同時提升材料的利用率。據實際應用數據顯示,使用該系統后,廢品率下降超過 30%,為企業節省了大量的成本,提高了生產效益。
(二)廣泛的應用場景
重工制造:大型構件焊接的 "可靠伙伴"
在船舶分段焊接、風電塔筒環縫跟蹤等重工制造領域,該系統發揮著重要作用。大型構件的焊接對精度要求極高,傳統焊接方式難以滿足需求,而激光焊縫跟蹤系統能夠精準跟蹤焊縫,確保大型構件的焊接質量,為重工制造行業的發展提供了有力支持。
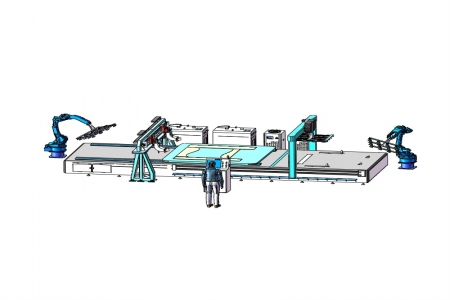
汽車行業:車身焊接的 "精準工匠"
在汽車行業中,白車身的點焊與弧焊需要極高的精度和穩定性。該系統能夠實現在線糾偏,確保車身各部件的焊接精度,提高汽車的整體質量和安全性,是汽車制造過程中不可或缺的重要技術。
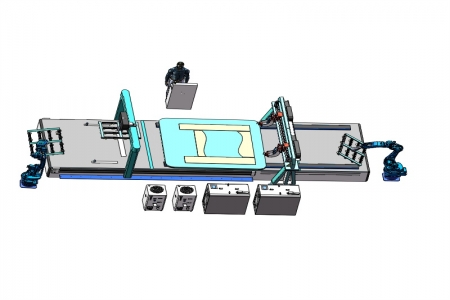
新能源領域:精密焊接的 "核心技術"
在動力電池模組精密焊接等新能源領域,對焊接的精度和可靠性要求極高。激光焊縫跟蹤技術能夠滿足這些要求,確保動力電池模組的焊接質量,為新能源產業的發展提供了關鍵的技術支撐。
四、未來發展趨勢展望
隨著工業 4.0 時代的到來,焊縫跟蹤技術正朝著多傳感器融合與 AI 智能化的方向大步邁進。鐳爍光電的研發團隊敏銳地捕捉到這一發展趨勢,正在積極探索將激光跟蹤與視覺識別、紅外測溫等技術相結合的可能性。通過多傳感器的融合,系統能夠獲取更豐富、更全面的焊接信息,為焊接過程的優化提供更多的數據支持。
同時,引入深度學習算法后,系統將具備更強的智能分析和決策能力,能夠實現焊接質量的預測以及工藝參數的自優化。這意味著焊接過程將不再依賴人工經驗進行調整,而是通過系統自身的智能算法,實時根據焊接情況進行優化,推動焊接全流程向智能化、自動化的方向邁進,為工業焊接帶來更加廣闊的發展空間。
結語
激光焊縫跟蹤技術通過 "感知 - 決策 - 執行" 的閉環控制模式,成功解決了自動化焊接中動態精度的難題,為工業焊接帶來了革命性的變化。鐳爍光電科技有限公司作為該領域的佼佼者,將繼續深耕光學傳感與工業算法領域,不斷投入研發力量,致力于為智能制造提供更加高效、可靠的焊接解決方案,推動工業焊接行業朝著更高水平發展,在工業 4.0 的浪潮中書寫更加輝煌的篇章。