鐳爍激光視覺焊縫跟蹤系統(tǒng)主要應(yīng)用于焊接前焊縫識(shí)別并自動(dòng)引導(dǎo)焊槍對(duì)準(zhǔn)焊縫進(jìn)行焊接,并在焊接過程中對(duì)焊縫進(jìn)行全程跟蹤,持續(xù)引導(dǎo)焊槍在正確位置上進(jìn)行焊接,也可與其他部件或系統(tǒng)協(xié)同工作,實(shí)現(xiàn)全自動(dòng)化、無人化焊接。

激光視覺焊縫跟蹤系統(tǒng)核心技術(shù)原理
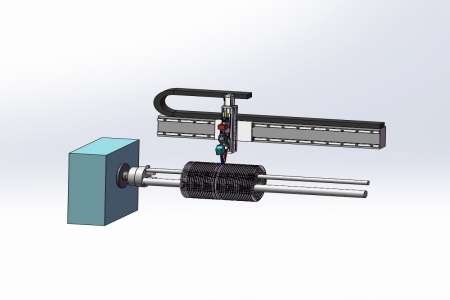
基于激光三角測(cè)距原理,本系統(tǒng)通過高精度視覺傳感器捕捉投射在焊縫區(qū)域的激光條紋形態(tài),經(jīng)智能算法解析生成三維點(diǎn)云數(shù)據(jù),實(shí)時(shí)重構(gòu)焊縫輪廓的空間坐標(biāo)。通過建立激光傳感單元與焊槍末端的動(dòng)態(tài)坐標(biāo)系,系統(tǒng)運(yùn)用空間幾何變換算法精確解算焊縫軌跡與焊槍位姿的偏差矢量,并將補(bǔ)償量實(shí)時(shí)傳輸至運(yùn)動(dòng)控制系統(tǒng),實(shí)現(xiàn)焊接過程中亞毫米級(jí)精度的動(dòng)態(tài)軌跡修正。
激光視覺焊縫跟蹤系統(tǒng)功能優(yōu)勢(shì)
■ 多場(chǎng)景適應(yīng)能力
覆蓋對(duì)接/搭接/角接等四大類接頭形式
兼容直縫/環(huán)縫/螺旋焊縫及異形軌跡跟蹤
適配TIG/MIG/MAG/SAW等主流焊接工藝
支持單焊槍及多焊槍協(xié)同作業(yè)模式
■ 智能工程架構(gòu)
模塊化設(shè)計(jì)兼容主流PLC系統(tǒng)
支持設(shè)備快速升級(jí)改造與跨平臺(tái)集成
定制化通訊協(xié)議適配各品牌焊機(jī)控制器
動(dòng)態(tài)標(biāo)定系統(tǒng)實(shí)現(xiàn)視覺-機(jī)械手快速坐標(biāo)映射
■ 先進(jìn)感知技術(shù)
多光譜融合技術(shù)有效消除弧光/金屬飛濺干擾
自適應(yīng)濾波算法提升復(fù)雜工況識(shí)別精度
智能容錯(cuò)機(jī)制確保異常工況連續(xù)穩(wěn)定跟蹤
超視距檢測(cè)技術(shù)突破傳統(tǒng)傳感器物理局限
■ 智能控制特性
基于深度學(xué)習(xí)的焊縫特征自主識(shí)別技術(shù)
模糊PID算法實(shí)現(xiàn)運(yùn)動(dòng)軌跡平滑優(yōu)化
自學(xué)習(xí)系統(tǒng)具備工藝參數(shù)自適應(yīng)調(diào)整能力
支持離線編程與在線修正雙模式運(yùn)行