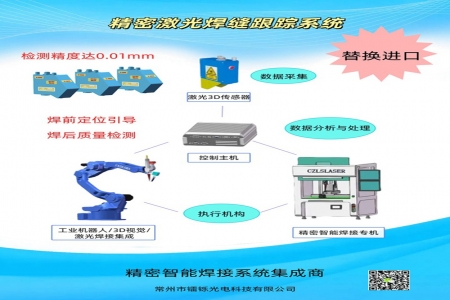
鐳爍自動焊接機器人焊縫跟蹤系統是一個高度集成的系統,它的作用主要是用來提升焊接質量和效率。

一、系統組成
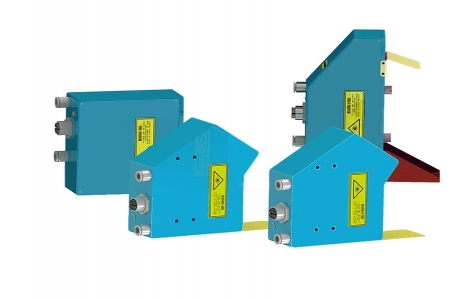
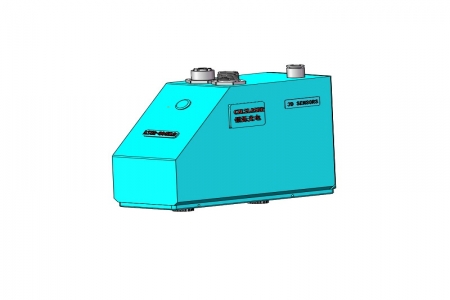
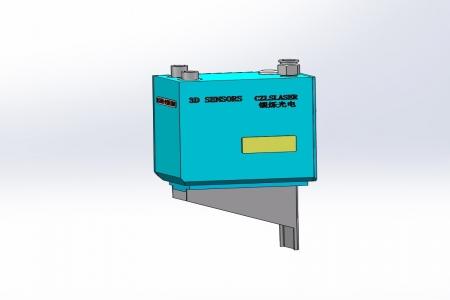
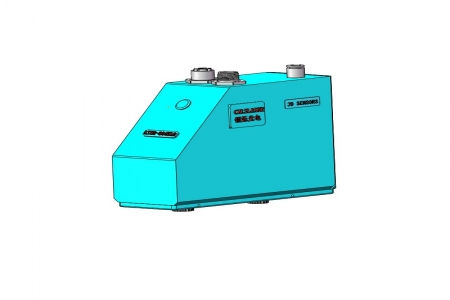
1、激光視覺傳感器
通過結構光或激光三角測量生成焊縫3D點云,利用圖像處理算法識別焊縫位置,適合復雜曲面,精度高、速度快。
2、控制系統
實時處理傳感器數據,深度學習)用于圖像識別,動態調整機械臂軌跡,結合焊縫幾何特征和焊接工藝參數。
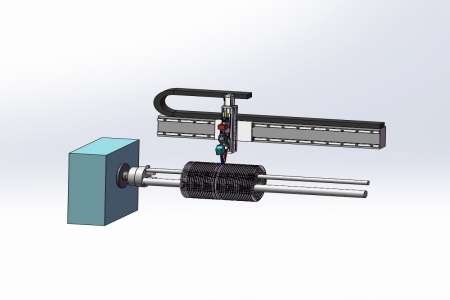
3、執行機構
采用伺服電機或機器人,重復定位精度可達±0.1mm,根據跟蹤結果實時調節電流、電壓和送絲速度,確保熔深和焊縫成形。

二、關鍵技術
1、實時圖像處理
使用OpenCV或Halcon庫進行圖像增強、二值化、霍夫變換檢測直線/曲線焊縫。融合視覺+激光數據,解決單一傳感器局限性。
強化學習優化焊接路徑,數字孿生模擬焊接過程,提前預測熱變形并補償。

三、應用場景
汽車制造:白車身點焊/弧焊,汽車門環、天窗拼板焊接,適應鍍鋅鋼板等高反光材料。
船舶焊接:長直焊縫跟蹤,配備防塵防水傳感器,適應車間惡劣環境。
航空航天:鈦合金薄壁件焊接,要求0.1mm級精度。
壓力容器:窄間隙焊縫跟蹤,同時配備焊縫缺陷檢測實時監控焊接質量。